Damit selbstfahrende Fahrzeuge mit öffentlichen Verkehrsmitteln fahren können, dürfen sie andere nicht gefährden. Dazu müssen Maschinen wie Menschen in der Lage sein, Verkehrssituationen zu antizipieren, dh vorausschauend zu fahren. Detaillierte Vorhersagen der Verkehrssituation wurden bisher jedoch als zu zeitaufwändig und daher unpraktisch angesehen, erklärt ein Münchner Forscherteam. Nach eigenen Angaben konnte nun nachgewiesen werden, dass es theoretisch möglich ist, Daten in Echtzeit auszuwerten und gleichzeitig die zukünftige Verkehrssituation zu simulieren.

Verpassen Sie keine Neuigkeiten! Mit unserem täglichen Newsletter erhalten Sie jeden Morgen alle Neuigkeiten von heise online aus den letzten 24 Stunden.
-
Melden Sie sich jetzt für den Newsletter an
Darüber hinaus konnte nachgewiesen werden, dass die Simulation zuverlässige Ergebnisse liefert. Die Sicherheitssoftware kann die Entwicklung autonomer Fahrzeuge erleichtern, da sie mit allen gängigen Bewegungssteuerungsprogrammen kombiniert werden kann, betont Matthias Althoff, Professor für Cyber-Physical Systems an der Technischen Universität München. Die Forschungsergebnisse wurden nun in der Zeitschrift veröffentlicht Natur veröffentlicht.
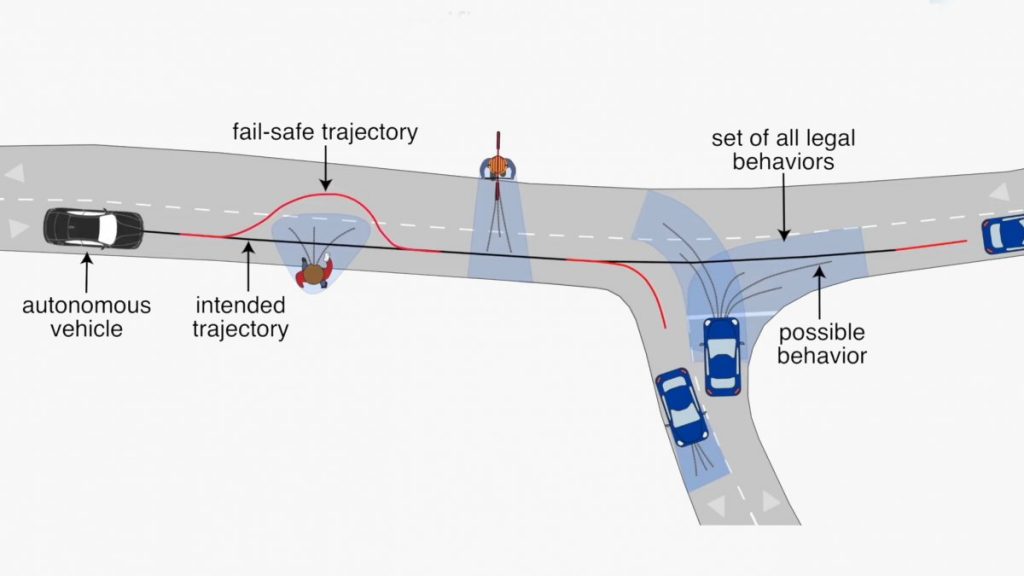
Auto links, Fußgänger auf der Strecke, Radfahrerin rechts
„Autonomes Fahren wird von der Bevölkerung nur akzeptiert, wenn Sie sicher sein können, dass die Fahrzeuge – so verwirrend die Verkehrssituation auch sein mag – andere Verkehrsteilnehmer nicht gefährden“, erklärt Althoff. Als Beispiel nennt er eine Situation, in der sich ein Auto einer Kreuzung nähert. Ein anderes Auto kommt aus der Kreuzung, es ist unklar, ob es rechts oder links abbiegen wird. Gleichzeitig betritt ein Fußgänger die Fahrspur direkt vor dem Auto und ein Radfahrer auf der anderen Straßenseite.
Althoff hat zusammen mit seinem Team ein Softwaremodul entwickelt, das ständig analysiert und vorhersagt, was während der Fahrt passiert. Die Sensordaten des Fahrzeugs werden jede Millisekunde aufgezeichnet und ausgewertet. Die Software berechnet alle möglichen Bewegungen für alle Verkehrsteilnehmer – sofern diese den Verkehrsregeln entsprechen. Auf diese Weise „blickt das System“ maximal sechs Sekunden in die Zukunft „.
Basierend auf diesen Szenarien ermittelt das System verschiedene Optionen für das Fahrzeug und berechnet gleichzeitig mögliche Notfallmanöver, die das Fahrzeug an einen sicheren Ort beschleunigen oder verlangsamen können, ohne andere zu gefährden. Nur wenn eine Route ohne vorhersehbare Kollision befahren werden kann und gleichzeitig ein Notfallmanöver möglich ist, darf sie vom selbstfahrenden Fahrzeug genutzt werden.
Einfache dynamische Modelle
„Die schnellen Berechnungen werden durch vereinfachte dynamische Modelle ermöglicht“, erklärt Althoff. Die Barrierefreiheitsanalyse berechnet, welche Positionen beispielsweise ein Auto oder ein Fußgänger in Zukunft einnehmen kann. Wenn alle Merkmale der Verkehrsteilnehmer berücksichtigt werden, ist die Berechnung zeitaufwändig, sodass das Team mit vereinfachten Modellen arbeitet. Diese sind den realen im Bewegungsbereich überlegen, aber mathematisch leichter zu verstehen. „Die größere Bewegungsfreiheit ermöglicht es ihnen, mehr mögliche Positionen einzunehmen – dies schließt auch die Positionen ein, die von echten Verkehrsteilnehmern erwartet werden.“
Zur Auswertung ihrer Berechnungen erstellte das Forscherteam ein virtuelles Modell, das auf realen Daten basiert, die während Testfahrten mit einem autonomen Fahrzeug in München gesammelt wurden. „Mit den Simulationen konnten wir nachweisen, dass das Sicherheitsmodul nicht zu einem Leistungsverlust im Fahrverhalten führt, dass die Prognoseberechnungen korrekt sind, Unfälle verhindert werden und das Fahrzeug im Notfall nachweislich sicher zum Stillstand kommt“, fasst Althoff zusammen.
(anw)

Organisator. Schöpfer. Evangelist der lebenslangen Popkultur. Freundlicher Zombie-Praktizierender.
You may also like
-
Gemini for Business: Google plant tiefere Integration von NotebookLM und neue KI-Skills
-
5 Dinge über KI, die Sie heute vielleicht übersehen haben: Nachrichtenverlage werden KI-Unternehmen verklagen; Die Polizei setzt auf KI und mehr
-
Optimiere deine Online-Präsenz mit professioneller SEO-Beratung
-
Allwyn gibt erste Partnerschaft mit der prestigeträchtigen Peace Race Cycling Tour bekannt
-
dynaCERT gibt weltweite Verkäufe für Q4 2022 bekannt